لراوبر ویب پاڼه لراوبر يو افغان – تازه خبرونه
لراوبر ویب پاڼه لراوبر يو افغان – تازه خبرونه
بسم الله الرحمن الرحيم
رادار له RAdio Detection And Ranging څخه اخيستل شويدي، چې د راديويی امواجو پواسطه د هدف target پلټل او د هغه خصوصياتو معلومولو په معنی دي. او هغه دستګاه ده. چې له يوي مشخصې نقطي څخه په درې بعدی فضا کې د هدف موقيعت او فاصله تعنيوي. رادار د فضا په لور مختلف جهتو سره په دوامداره سيګنلونه ليږي. چې په فضا کې د کوم جسم سره د ليږدو وروسته نوموړی سيګنل د دوهم ځل لپاره د رادار د انتن په لوري انعکاس کيږي، چې له نوموړي تر لاسه شوي سيګنل څخه د جسم فاصله او سمت تعينيږي. دا هغه اساسی او ابتدايي ګړني دي د کوم پواسطه چې د رادار دستګاه کار او فعاليت کوي. رادار يو له اساسي او ډير استعماليدونکي الکترونيکي دستګاه ده. چي د مختلفو اهدافو لپاره استعماليږي. لکه:
د فضايي نظامي اهدافو تر لاسه کولو لپاره، د هدف د فاصلې د اندازه کولو او په نښه کولو
د نظامي توغنديو د رهنمايی کول او کنترولول
د استخباراتي معلوماتو د راټولول
د هوايي چلند د ترافيک د کنترول
د هوا حالاتو وړانديني او داسي نور
د هدف د فاصلی د تعينولو لپاره رادار د فضا په لور راديويي امواج استويی، نوموړی امواج په فضا کې د کوم جسم سره د لږيدلو وروسته د رادار د انتن پر لور انعکاس کوي. د رادار دستګاه د انعکاس شوي سيګنل د تحليل او تجزيی څخه د سيګنل د تګ او راتګ وخت تعينووي. که چيري د سيګنل د تګ راتګ وخت په t وښودل شي. نو دسيګنل تګ تر هدف پوري په t/2 وخت کې صورت نيسي. او څرنګه چې پوهيږو د راديويي امواجو سرعت تقريبا د نور له سرعت (3×108 m/s) سره مساوي دي. نود رادار څخه تر هدف پوري د لاندي فورمول پواسطه محاسبه کيږي.
د رادار څخه تر هدف پوري فاصله.png)
په پورتني فورمول کې v د راديويي امواجو سرعت او t د سيګنل د تګ راتګ وخت دي.
همدارنګه د پورتني فورمول پواسطه د هدف فاصله د رادار دستګاه څخه محاسبه کولای شو. او د هدف سمت د انعکاس شوي سيکنل له سمت څخه تعينيږي.
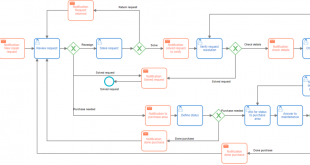
د رادار سيستم عناصر Radar System Elements
.jpg)
غواړو د رادار سيستم اساسی عناصر وڅيړو. د رادار دستګاه اساسی او ابتدايي عناصر په لاندي شکل کې ښودل شوي دي.
د هر عنصرکړني به په تفصيل سره وڅيړو. د رادار دستګاه اساسی عناصر عبارت دي له:
ليږونکي (Transmitter)
دوه لاري (Duplexer)
اخيستونکي (Receiver)
انتن (Antenna)
ليږونکی Transmitter
ليږونکي transmitter راديويي امواج انتن ته استوي. چې د timing circuit پواسطه د لوړ ولتاژ high voltage څخه پلزونه Pulses جوړوي. چې د دوو توليدوونکو پلزونو تر منځ يو لويه وقفه gap وجود لري. چي له دغه وقفي(دمې) ځيني وروسته دوباره بيا پلزونه د ليږدونکي transmitter پواسطه توليديږي. چې د دوو پرله پسې پلزونو د شروع وختونو تر منځ وخت د مکرر وخت pulse repetition time پنوم ياديږي. همدارنګه د پلز مکرره فريکانسي pulse repetition frequency د هغه پلزونو شمير دي چې په يوه ثانيه کې ليږل کيږي. چې ليږونکي transmitter نوموړي پلزونه د دوه لاري duplexer له لياري انتن ته رسوي. او د ليږونکي اساسي کړني برسيره پر دي چې ليږونکي سيګنل غښتلي کولو، ماجوليشن، د سيګنل د منبع په حيث او د چينل کوډ کوونې وظېفه هم پر غاړه لري.
Fprt = 1/Tprt د پلز مکرره فريکانسی (Pulse repetition frequency)
په پورتني فورمول کې Tprt د پلز مکرر وخت دي.
د سيګنل د پلز پراخوالی Pulse width او د پلز مکرر وخت Pulse repetition time تر منځ نسبت ته ډيوټې سيکل Duty Cycle وويل کيږي.
Duty Cycle = Pulse width/ Tprt = Pulse frequency x Fprt
دپلز مکرره فريکانسي x د پلز پراخوالي
مثال: که چيري ديو سيګنل د پلز پراخوالي 3.6 µsec وي. او د پلز مکرره فريکانسي 100 KHz وي. نوموړی سيګنل ډيوټې سيکل Duty Cycle پيدا کړي.
حل: لرو چې
د پلز پراخوالي 3.6 µsec
د پلز مکرره فريکانسي 100 KHz
= 3.6 µsec x 100 KHz = 0.36 دپلز مکرره فريکانسي x د پلز پراخوالي = Duty Cycle
دوه لاری Duplexer
دوه لاري duplexer له ليږوونکي څخه ډير قوي پلزونه تر لاسه کوي. او د انتن په لوري رهنمايي کوي. او کوم انعکاس شوی سيګنل چې د انتن پواسطه ترلاسه کيږي د دوه لاري له لاري اخيستونکي receiver ته ورسيږي. نو دوه لاري duplexer د ليږونکي transmitterد قوي پلز لرونکي سيګنلونو او د انتن پواسطه ترلاسه شوي نسبتا ضعيف انعکاس شوي سيګنلونو تر منځ د بيلوونکي او تشخيصوونکي وظيفه په غاړه لري. همدارنګه دوه لاري انعکاس شوي سيګنل د تحليل او تجزيي لپاره کنترولونکي controller ته ليږي. او انتن په عينی وخت کې هم سيګنل ليږي او هم سيکنل تر لاسه کوي. چې د رادار دستګاه انتن د ليدونکی صفحي کنترولونکي display controller پواسطه کنتروليږي.
اخيستونکی Receiver
اخيستونکي receiver انعکاس شوي سيګنلونه له دوه لاري duplexer څخه ترلاسه کوي، چې تقريبا د ډيماجوليشن او ډيکوډ کولو عمليه پرې سر ته رسوي، وروسته بيا نوموړی سيګنل د تحليل او تجزيې لپاره کنترولونکي controller ته استووي. د دقيقې نتيجې تر لاسه کولو لپاره کنترولونکی controller د ليږونکي او اخيستونکي د کړنو وختونه سره همزمان کوي. څرنګه چې مخکې ذکر شو، په کنترولونکې کې د وخت محاسبه کول، د ليږونکي او اخيستونکي د کړنو وختونه همزمانې کول او همدارنګه دوه لاري duplexer هم ډير مهم شميرل کيږي. څرګندونکې کنترولونکی control display د هدف ترلاسه کولو لپاره سيګنل ته د ورکړل شوي وخت محاسبه سرته رسوي، چې په همدي اساس د هدف فاصله تعينولي شو.
انتن
.jpg)
انتن د کنترولونکي controller برقي سيګنلونو پواسطه په دوامداره ډول کنتروليږي. د رادار په سيستمونو کې د هدف target په نښه کولو لپاره له متغير جهت لرونکي ارې Phased array انتنونو څخه استفاده کيږي. چې جهت او سمت د نوموړو انتنونه متغير دي. چې په همدي اساس کنترلونکي د هدف دقيقه زاويه پيداکولای شي. نوموړي انتنونه اکثره وخت څو شعاعوې Beams د فريکانسيو په مختلفو ارتفاعاتو سره elevation frequency range د هدف په لوري خپريږي، تر څو د هدف ارتفاع له ځمکې څخه محاسبه کړي، تر څو د هدف دقيق موقيعت په دري بعدی فضا کې په ډير دقت سره وپيژندل شي.
په فضا کې د هدف دقيق موقيعت په نښه کولو لپاره د رادار په دستګاوو کې له متغير جهت لرونکي ارې انتن څخه استفاده کيږي. چې ډيري نري او کمسوری narrowed شعاعووي د هدف په لوري خپروي. او نوموړي شعاعووي د انتن جهت تغيرونکي Phased Shifter پواسطه کنترولوي، او نوموړي جهت تغيرونکي په لوړ سرعت سره تغير کوي تر څو د هدف حرکت تثبيت کړي. کله چې انتن د هدف په لوري سيګنل واستوي، د هدف سره د ليږدلو وروسته يو ايکو echo سيګنل تر لاسه کوي. او د هدف د موقيعت په تغير سره نوموړی ايکو صفر zero کيږي. نو انتن داسي عيار شوي وي چې په چالاکی سره د هدف نوي موقيعت په نښه کړي. نو د هدف لومړی موقيعت او دوهم موقيعت تر منځ د وخت توپير محاسبه کيږي. او په همدي اساس سرعت د هدف تعينوي. څرنګه چې الکترومقناطيسي امواج تقريبا د نور په سرعت حرکت کوي. نو د هدف په نښه کول خورا په ډير دقيق انتخابيږي. د متحرک هدف په نښه کول د متغيرجهت لرونکي Phase array انتن پواسطه په دوهم شکل کې ښودل شويدي.
که هدف په Q1 موقيعت کې قرار ولري. نو د متغير جهت لرونکي ارې انتن پواسطه N-1 سيګنلونه د فضا په لور ليږل کيږي. چې نوموړي بريښيدونکې سيګنلونه د هدف پيژندني لپاره په مختلفو فريکانسيو سره د اري انتن د عناصرو پواسطه استول کيږي. په فضا کې د هدف سره د لږيدلو وروسته انعکاس شوي سيګنل د يو مشخص تير او پنډوالي beam سره د انتن پواسطه ترلاسه کيږي. چې د تر لاسه شوي سيګنل پواسطه رادار انتن د هدف موقيعت R1 او د هدف اړونده زاويه 1θ محاسبه کولاي شو. مګر د لږ ځنډ وروسته هدف خپل موقيعت بدلوي او Q2 ته رسيږي. همدارنګه د دوهم ځل لپاره هم د R2 موقيعت او د هدف د موقيعت زاويه 2θ هم محاسبه کيداي شي. نو په همدي اساس د هدف څرک track د حرکت په هر نقطه کې معلوميدلي شي.
پرله پسې امواجو استونکی رادار او پلز استونکی رادار
Continuous Wave Radar and Pulsed Radar
رادار د ليږونکې سيګنل د مشخصاتو له مخي طبقه بندی کيږي. چې دوه ابتدايي او اساسي ډولونه د رادار وجود لري.
پرله پسې امواجو استونکی رادار
پلز استونکی رادار
پرله پسې امواجو استونکی رادار Continuous Wave Radar
.jpg)
پرله پسې امواجو استونکی رادار د متحرک هدف موقيعت پيداکولو لپاره استعماليږي. او ثابت فريکانسي سيګنلونه د هدف په لور فضا ته استوي. دا ډول رادار په ځانګړي ډول د نظامې چارواکو له لوري د هوايي چلند د سرعت کنترول په موخه استعماليږي. کله چې هدف فاصله له رادار څخه ليري يا نږدي کيږي. د دوپلر تاثيراتو Doppler Effect له وجهې د ليږونکي سيګنل او اخستونکي سيګنل فريکانسي بايد سره توپير لري. چې معمولا له دوپلر فريکانسيو Doppler Frequencies څخه استفاده کوي، نو په همدي اساس د دوپلر رادار Doppler Radar پنوم هم ياديږي. د پرله پسې امواجو استونکی رادار پواسطه د توليد شويو پلزونو نمونه په دريم شکل کې ښودل شويده.
.jpg)
د متحرک هدف د دوپلر تغير Doppler Shift په پورته شکل کې ښودل شويدي.
هدف يا متحرک جسم په فضا کې له لومړي موقيعت څخه څلورم موقيعت ته په حرکت دي، چې د لاري په اوږدو کې له لومړي موقيعت څخه دوهم موقيعت ته نږدي کيږي، او د دريم او څلورم موقيعت لوري په حرکت کوي. نو په هر حالت کې په فريکانسي د دوپلر تغير Doppler Shift واقع کيږي.
د سيګنل په فريکانسي کې تغير .png)
په پورتنی فورمول کې، v سرعت د هدف په فضا کې، λ د ليږونکی سيګنل طول موج، θ د هدف موقيعت او د حرکت سمت له رادار څخه دی.
نوموړي نسبي تغير د ليږونکی سيګنل په فريکانسي د هدف د سرعت پوری اړه لري. چې نوموړي تغير د دوپلر تاثيراتو Doppler Effect پنوم ياديږي.
پلز استونکی رادار Pulsed Radar
پلز استونکی رادار د سيګنل د ليږلو لپار ه له امپليتود ماجوليشن څخه استفاده کوي. چې د پرله پسې امواجو استونکی رادار Continuous Wave Radar او پلز استونکی رادار Pulsed Radar تر منځ يو له اساسي توپيرونو څخه شميرل کيږ ي. چې د پلز استونکی رادار پواسطه ليږونکي او ترلاسه کيدونکي سيګنلونه په څلورم شکل کې ښودل شوي.
د فضا په لوري استوونکي سيګنل د لوړي فريکانسي پواسطه ماجوليشن کيدلو وروسته د انتن پواسطه فضا ته استول کيږي. او د انعکاس شوي سيګنل انرژي د ډيري فاصلي د طي کولو له امله لږ څه تضعيف پيداکوي. همدارنګه که د دوهم استوونکي سيګنل انرژي هم په کافي اندازه ډيره وي، نو اړونده انعکاس کيدونکي سيګنل به هم په واضحه توګه له لومړي سيګنل څخه د توپير کيدني وړ وي. د رادار مخلق او پيچلي کاري فعاليت د هدف څخه په مختلفو وختونو کې له رارسيدلي انعکاس شوو سيګنلونو تر منځ د فاصلي د پيداکولو لپاره د رادار له يقيني رنج Radar Clear Range څخه استفاده کوي.
د رادار يقيني او روڼ رنج له لاندي فورمول څخه محاسبه کيږي. .png)
په پورتني فورمول کې C د ليږونکي سيګنل د خپريدو سرعت په فضا کې (3 x 108 m/s) ، Tprt د پلز مکرر وخت او Fprt د پلز مکرره فريکانسي ده.
رادار د رنج معادله Radar Range Equation
.png)
د هر رادار کړني د هغه رنج له معادلي څخه تعينيږي. او د نايز تاثيرات او د انعکاس تاثيرات دواړه په نوموړي فورمول کي ځاي پر ځاي شوي دي. چې نوموړي فورمول د هدف موقيعت پيژندني کې ډير مهم رول لري. غير لدي چې د رادار په کوچنيو او پيچلو تاثيراتو باندي تمرکز ونه شي. نو د رادار تر لاسه کيدونکي انرژي د لاندي فورمول په واسطه تعينيږي.
په پورتني فورمول کې Ptrans د انتن ليږونکي پاور، G د انتن غښتلتيا Gain، λ د ليږونکي سيګنل طول موج، σ د رادار د هدف ساحه په متر مربع اوR د رادار او هدف تر منځ فاصله ښايي. او معمولا د پاور اندازه او نور اړونده پارامترونه په ببببب ښودل کيږي. چي کولاي شو اړونده پارامترونه يي د پاور واحد ته اړولي شو.
.png) =Factor
=Factor
که تر ټولو کم پاور Pmin ترلاسه شوي وي، نو هدف اعظمي رنج Rmax له لاندي معادلي څخه محاسبه کيداي شي.
.png)
چيرته چې:
G د انتن غښتلتيا Gain، λ د ليږونکي سيګنل طول موج، σ د رادار د هدف ساحه په متر مربع، Ptrans د انتن ليږونکي پاوراو min(Prec) تر ټولو کم ترلاسه شوي پاور دی.
رادار پواسطه هدف موندنه
Detection of the Target Using Radar
د رادار پواسطه د هدف تشخيص دومره اسانه ندي لکه څرنګه چي معلوميږي. بلکي د هدف پيژنده او تشخيص د ځينو اساسي فکتورونو پوري اړه لري چي په لاندي ډول دي.
په سيګنل کې مختلف ضايعات او د پاور کميدنې شتوالې
د هدف څخه په ترلاسه کيدونکي سيګنل کې د پام وړ نايز
ترلاسه کيدونکي سيګنل کې د بې نظمي او ګډوډي شتوالي
په فضا کې د نورو سيګنلونو مداخله
د نورو الکترونکي منابعو انعکاس او انکسار
نو مختلفو رياضيکي معادلو ته ضرورت دي تر څو پورتني ټول پارامترونه په بر کې ونيسې. مګر په عملې ډول د رادار دستګاه نوموړي ټولي ستونزي په موزون ډول په نظر کې نيولي دي.
هدف موندنه يواځي له انعکاس شوي سيګنل څخه صورت نشي نيولي، ځکه چې په انعکاس شوي سيګنل کې يواندازه تضعيف وجود لري، او په فضا کې له موجودو الکتريکي سيګنلونو مداخلات او تاثيرات ګاللي دي. د هدف په تشخيص کې اساسي ستونزه داده چي د انعکاس شوي سيګنل څخه په اخستونکي receiver کي نايز ترلاسه کيږي. او د تضعيف شوي او نايزي سيګنل څخه د هدف پيژنده يو څه ستونزمن کار دي. مګر په ننني عصر کې مختلف ميتودونه او طريقې منځ ته راغلي تر څو د نوموړو ستونزو سره مبارزه وکړي. اود نوموړو ستونزو اساسي حل د تصميم نيوني پروسه Decision Process ده.
د تصميم نيوني پروسه Decision Process هغه پروسه ده چې د انعکاس شوي سيګنل شتوالي او نشتوالي تعينوي. چې نوموړي تصميم دانعکاس شوي سيګنل د احتمالي شتوالي پر اساس نيول کيږي. کله چې نايز اخستونکي receiver ته ورسيږي نو يو مقدار ولتاژ توليدوي. نو که کوم هدف په فضا کې وجود هم ونه لري د رادار په خروجي کي به يو اندازه ولتاژ ښودل کيږي. او که له هدف څخه کوم انعکاس شوي سيګنل هم ترلاسه شي نو په خروجي کې بعضې مختلف ولتاژونه د هدف موجوديت ښودني په منظور ليدل کيږی. ددي لپاره چې د هدف له لوري انعکاس شوي سيګنل او نايزي سيګنل د ولتاژونو تر منځ يو څه توپير وکولای شو، نو د دواړو مختلفو ولتاژونو تر منځ د کټ اف نقطعي Cutoff Point سره فرق لري. چې د مانع کوونکي ولتاژ Barrier Voltage پنوم ياديږي.
نايز د تصميم نيوني Decision Process پر پروسي د پام وړ تاثير لري. چې نايز په طبيعي ناټاکلي اندازه سره واقع کيږي. او کله د نايز انرژي له انعکاس شوي سيګنل څخه هم لوړه وي. چې انعکاس شوي سيګنل او مانع کوونکي ولتاژ Barrier Voltage هم له منځه وړي. نو ددی لپاره تصميم نيوني پروسه Decision Process د انعکاس شوی سيګنل له احتمالې شتوالي څخه استفاده کوي.
.jpg)
نو ډيرو مخلق او پيچلو معادلو ته ضرورت دی. تر څو شته ستو نزي حل او د رادار د هدف موندني قدرت پري محدود شي. د رادار پواسطه هدف موندنه د تصميم نيوني پروسه Decision Process په اساس له لاندي شکل کې ښودل شويدي.